In this article we connect a VL6180X to a Raspberry Pi Pico running Circuitpython
Sensor Information
First lets look at some information about the sensor from the manufacturer
The VL6180X is a ground-breaking technology allowing absolute distance to be measured independent of target reflectance.
Instead of estimating the distance by measuring the amount of light reflected back from the object (which is significantly influenced by color and surface), the VL6180X precisely measures the time the light takes to travel to the nearest object and reflect back to the sensor (Time-of-Flight).
Combining an IR emitter, a range sensor and an ambient light sensor, the VL6180X is easy to integrate and saves the end-product maker long and costly optical and mechanical design optimizations.
The module is designed for low power operation. Ranging and ALS measurements can be automatically performed at user defined intervals. Multiple threshold and interrupt schemes are supported to minimize host operations.
Host control and result reading is performed using an I2C interface. Optional additional functions, such as measurement ready and threshold interrupts, are provided by two programmable GPIO pins.
Key Features
- Three-in-one smart optical module
- Proximity sensor
- Ambient Light Sensor
- VCSEL light source
- Fast, accurate distance ranging
- Measures absolute range from 0 to above 10 cm (ranging beyond 10cm is dependent on conditions)
- Independent of object reflectance
- Ambient light rejection
- Cross-talk compensation for cover glass
- Gesture recognition
- Distance and signal level can be used by host system to implement gesture recognition
- Ambient light sensor
- High dynamic range
- Accurate/sensitive in ultra-low light
- Calibrated output value in lux
- Two programmable GPIO
- Window and thresholding functions for both ranging and ALS
Parts Required
| Name | Link |
| Pico | Raspberry Pi Pico Development Board |
| VL6180X | VL6180X Range Finder Optical Ranging Sensor Module |
| Connecting cables | Aliexpress product link |
Schematic/Connection
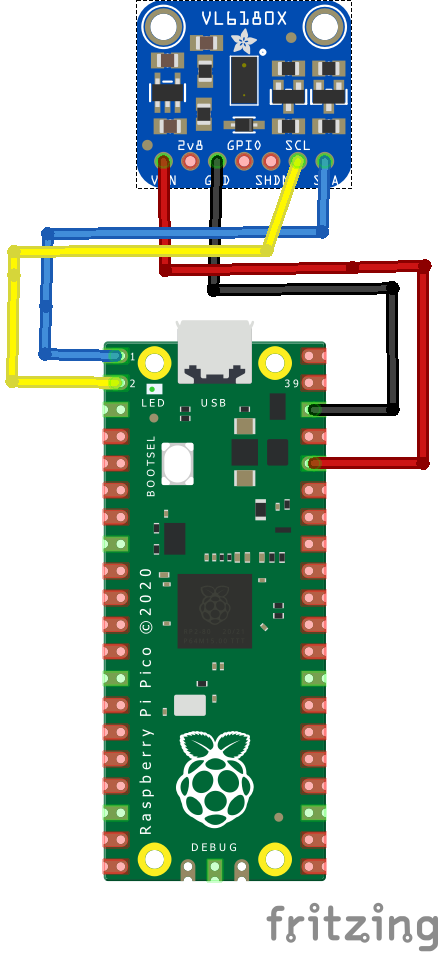
I used the Adafruit vl6180x sensor and in this case used the Stemma connection
For the STEMMA QT cables, it uses the Qwiic convention:
Black for GND
Red for V+
Blue for SDA
Yellow for SCL
So color coded for ease of use, this layout shows a connection to the module
Code Example
I used Thonny for development
The following is based on a library , I copied the adafruit_vl6180x.mpy library for this device to the lib folder on my Feather M0 Express – https://circuitpython.org/libraries
This is the basic example which comes with the library
[codesyntax lang=”python”]
import time
import board
import adafruit_vl6180x
import busio
# Create sensor object, communicating over the board's default I2C bus
i2c = busio.I2C(scl=board.GP1, sda=board.GP0) # uses board.SCL and board.SDA
sensor = adafruit_vl6180x.VL6180X(i2c)
# Main loop prints the range and lux every second:
while True:
# Read the range in millimeters and print it.
range_mm = sensor.range
print("Range: {0}mm".format(range_mm))
# Read the light, note this requires specifying a gain value:
# - adafruit_vl6180x.ALS_GAIN_1 = 1x
# - adafruit_vl6180x.ALS_GAIN_1_25 = 1.25x
# - adafruit_vl6180x.ALS_GAIN_1_67 = 1.67x
# - adafruit_vl6180x.ALS_GAIN_2_5 = 2.5x
# - adafruit_vl6180x.ALS_GAIN_5 = 5x
# - adafruit_vl6180x.ALS_GAIN_10 = 10x
# - adafruit_vl6180x.ALS_GAIN_20 = 20x
# - adafruit_vl6180x.ALS_GAIN_40 = 40x
light_lux = sensor.read_lux(adafruit_vl6180x.ALS_GAIN_1)
print("Light (1x gain): {0}lux".format(light_lux))
# Delay for a second.
time.sleep(1.0)
[/codesyntax]
Output
Here is what I saw in Thonny REPL window
Range: 95mm
Light (1x gain): 0.0lux
Range: 94mm
Light (1x gain): 0.0lux
Range: 96mm
Light (1x gain): 0.0lux
Range: 27mm
Light (1x gain): 0.0lux
Range: 17mm
Light (1x gain): 0.0lux
Range: 19mm
Light (1x gain): 0.0lux
Links
https://www.st.com/resource/en/datasheet/vl6180x.pdf
1 comment
[…] Connecting a VL6180X distance sensor to a Raspberry Pi Pico running CircuitPython – RP2040learning.com. […]
Comments are closed.