In this article we connect the ever popular MPU6050 Accelerometer and Gyroscope Sensor to a raspberry Pi Pico and we will then display the temperature and humidity to the repl window in Thonny using micropython
Lets look at the sensor first
Features
The MPU-60X0 is the world’s first integrated 6-axis MotionTracking device that combines a 3-axis gyroscope, 3-axis accelerometer, and a Digital Motion Processor™ (DMP) all in a small package.
With its dedicated I2C sensor bus, it directly accepts inputs from an external 3-axis compass to provide a complete 9-axis MotionFusion™ output. The MPU-60X0 MotionTracking device, with its 6-axis integration, on-board MotionFusion™, and run-time calibration firmware, enables manufacturers to eliminate the costly and complex selection, qualification, and system level integration of discrete devices, guaranteeing optimal motion performance for consumers.
The MPU-60X0 is also designed to interface with multiple noninertial digital sensors, such as pressure sensors, on its auxiliary I2C port. The MPU-60X0 is footprint compatible with the MPU-30X0 family.
The MPU-60X0 features three 16-bit analog-to-digital converters (ADCs) for digitizing the gyroscope outputs and three 16-bit ADCs for digitizing the accelerometer outputs. For precision tracking of both fast and slow motions, the parts feature a user-programmable gyroscope full-scale range of ±250, ±500, ±1000, and ±2000°/sec (dps) and a user-programmable accelerometer full-scale range of ±2g, ±4g, ±8g, and ±16g
You can read more about the sensor in the datasheet linked at the bottom of this article if you feel that way inclined.
Parts Required
| Name | Link |
| Pico | Raspberry Pi Pico Development Board |
| MPU6050 | |
| Connecting cables | Aliexpress product link |
Schematic/Connection
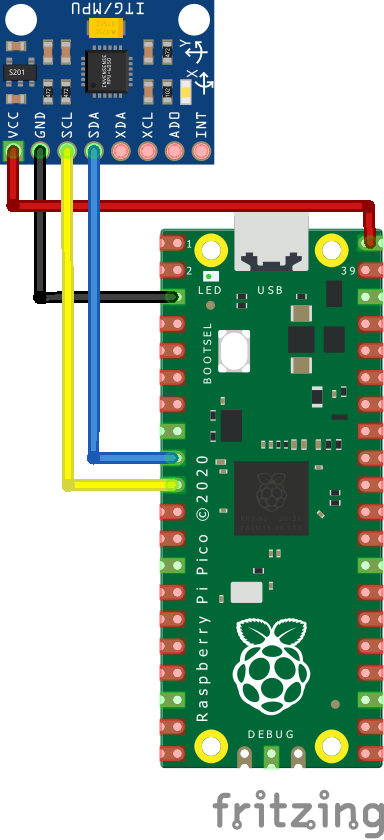
To connect the display to your Raspberry PI Pico requires just 3 wires, you just need to wire the Vcc and GND PINs from display to VBuS and a GND PINs of RPI Pico, then the SCL and SDA pins from the module to suitable pins from your Raspberry PI Pico, in this case we use pins 6 and 7
Here is a layout in fritzing to show this
Code Example
I use thonny for all development
You will need to copy the MPU6050 library to your Pico or similar Rp2040 board
Here it is, download and unzip the python file – mpu6050 library
Now for the code example
import math
import utime
from machine import Pin, I2C
from mpu6050 import MPU6050
mpu = MPU6050(bus=1, scl=Pin(7), sda=Pin(6))
def main():
last_Gx, last_Gy = 64, 64
while True:
g = mpu.readData()
Gx, Gy = (int)(64 + g.Gx * 30), (int)(64 + g.Gy * -30)
print("X:{:.2f} Y:{:.2f} Z:{:.2f}".format(g.Gx, g.Gy, g.Gz))
utime.sleep_ms(500)
pass
if __name__ == "__main__":
main()
In the repl window I saw this is
>>> %Run -c $EDITOR_CONTENT X:0.00 Y:0.00 Z:0.00 X:-2.00 Y:0.37 Z:0.32 X:-2.00 Y:0.37 Z:0.31 X:-2.00 Y:0.27 Z:0.43 X:-2.00 Y:-0.03 Z:-0.57 X:-1.02 Y:-0.85 Z:-0.44 X:-2.00 Y:-0.24 Z:-0.92 X:-2.00 Y:-0.40 Z:-0.62 X:-2.00 Y:0.02 Z:0.32