In this article we connect a MMA8451Q accelerometer to a Raspberry Pi Pico running Circuitpython
Sensor Information
The MMA8451Q is a smart, low-power, three-axis, capacitive, micromachined accelerometer with 14 bits of resolution. This accelerometer is packed with embedded functions with flexible user programmable options, configurable to two interrupt pins.
Embedded interrupt functions allow for overall power savings relieving the host processor from continuously polling data.
There is access to both low-pass filtered data as well as high-pass filtered data, which minimizes the data analysis required for jolt detection and faster transitions.
The device can be configured to generate inertial wakeup interrupt signals from any combination of the configurable embedded functions allowing the MMA8451Q to monitor events and remain in a low-power mode during periods of inactivity.
Features
• 1.95 V to 3.6 V supply voltage
• 1.6 V to 3.6 V interface voltage
• ±2 g/±4 g/±8 g dynamically selectable full scale
• Output data rates (ODR) from 1.56 Hz to 800 Hz
• 99 μg/√Hz noise
• 14-bit and 8-bit digital output
• I2C digital output interface
• Two programmable interrupt pins for seven interrupt sources
• Three embedded channels of motion detection
— Freefall or motion detection: one channel
— Pulse detection: one channel
— Jolt detection: one channel
• Orientation (portrait/landscape) detection with programmable hysteresis
• Automatic ODR change for auto-wake and return to sleep
• 32-sample FIFO
• High-pass filter data available per sample and through the FIFO
• Self-test
• Current consumption: 6 μA to 165 μA
Parts Required
| Name | Link |
| Pico | Raspberry Pi Pico Development Board |
| MMA8451 | MMA8451 Digital Triaxial Accelerometer High-precision Inclination Module |
| Connecting cables | Aliexpress link |
Schematic/Connection
Black for GND
Red for V+
Blue for SDA
Yellow for SCL
So color coded for ease of use, this layout shows a connection to the module
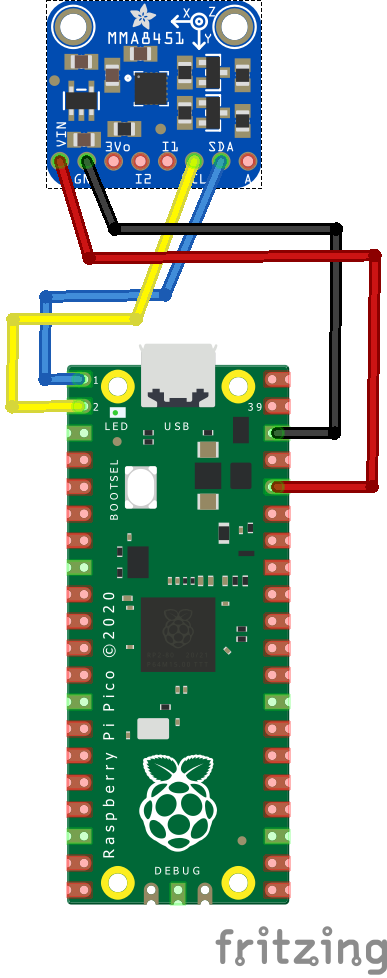
rp2040 and mma8451
Code Example
I used Thonny for development
The following is based on a library , I copied the adafruit_mma8451.mpy library for this device to the lib folder on my Raspberry Pi Pico – https://circuitpython.org/libraries
This is the basic example which comes with the library
[codesyntax lang=”python”]
import time
import board
import adafruit_mma8451
import busio
i2c = busio.I2C(scl=board.GP1, sda=board.GP0) # uses board.SCL and board.SDA
sensor = adafruit_mma8451.MMA8451(i2c, address=0x1C)
# Main loop to print the acceleration and orientation every second.
while True:
x, y, z = sensor.acceleration
print(
"Acceleration: x={0:0.3f}m/s^2 y={1:0.3f}m/s^2 z={2:0.3f}m/s^2".format(x, y, z)
)
orientation = sensor.orientation
# Orientation is one of these values:
# - PL_PUF: Portrait, up, front
# - PL_PUB: Portrait, up, back
# - PL_PDF: Portrait, down, front
# - PL_PDB: Portrait, down, back
# - PL_LRF: Landscape, right, front
# - PL_LRB: Landscape, right, back
# - PL_LLF: Landscape, left, front
# - PL_LLB: Landscape, left, back
print("Orientation: ", end="")
if orientation == adafruit_mma8451.PL_PUF:
print("Portrait, up, front")
elif orientation == adafruit_mma8451.PL_PUB:
print("Portrait, up, back")
elif orientation == adafruit_mma8451.PL_PDF:
print("Portrait, down, front")
elif orientation == adafruit_mma8451.PL_PDB:
print("Portrait, down, back")
elif orientation == adafruit_mma8451.PL_LRF:
print("Landscape, right, front")
elif orientation == adafruit_mma8451.PL_LRB:
print("Landscape, right, back")
elif orientation == adafruit_mma8451.PL_LLF:
print("Landscape, left, front")
elif orientation == adafruit_mma8451.PL_LLB:
print("Landscape, left, back")
time.sleep(1.0)
[/codesyntax]
Output
Here is what I saw in Thonny REPL window
Acceleration: x=-1.470m/s^2 y=6.742m/s^2 z=6.311m/s^2
Orientation: Portrait, down, front
Acceleration: x=1.839m/s^2 y=7.034m/s^2 z=-6.416m/s^2
Orientation: Portrait, down, back
Acceleration: x=9.840m/s^2 y=1.140m/s^2 z=2.442m/s^2
Orientation: Landscape, right, front
Acceleration: x=3.170m/s^2 y=4.707m/s^2 z=-7.853m/s^2
Orientation: Portrait, down, back
Acceleration: x=1.523m/s^2 y=6.713m/s^2 z=-7.072m/s^2
Orientation: Portrait, down, back
Links